

摘要:针对农机控制系统可靠性较低的问题,基于PLC系统对农机控制系统进行了设计,并对其可靠性进行了研究。该农机采用可编程控制器PLC进行控制,其硬件系统主要组成为踏板、方向盘、挡位和牵引装置等,软件系统对农机的自动导航和电-液悬挂系统进行控制。农机的可靠性评价采用模糊神经网络模型,通过确定神经网络结构、计算法方式和评价模型对农机进行可靠性评价。可靠性试验结果表明:基于PLC机器人的农机控制系统的可靠性较高,可以满足用户需求。
 加入收藏
加入收藏
为了适应农村的发展,满足农民的需求,需要改进和完善农产品相关机械的各项功能,增加机械的可使用参数范围,并逐步向机电一体化迈进,使之更加趋于多元化、动态化[1]。但是,随着农机产品的结构越来越复杂,使用范围越来越严格,农机产品发生故障的几率随着增加,可靠性的问题日益凸显。一旦农机在作业过程中出现故障,则会严重影响作业效率,降低农民收入,甚至还会影响农机产品的进一步发展。
可靠性属于产品的固有属性,也是重要的质量指标。可靠性的定义是指产品在规定的时间和条件下完成规定工作的能力。可靠性较高的产品在使用过程不易出现故障,作业效率高,能够保证生产。可靠性设计可以通过技术和理论数据,对产品的元件、系统等进行设计和改进。经统计,我国农机的平均无故障运行时间大概为30h,故障率较高[2]。通过分析发现,造成农机可靠性较低的原因主要有两方面:一是企业为降低成本采购性能较差的原材料或者元件;二是农机本身系统存在缺陷,不能进行智能控制。
PLC控制系统是由PLC和控制设备组成[3],一般作为主控单元。通过PLC和各控制仪表的通信及时获得系统运行参数,达到对设备的控制。PLC控制系统具有运算精确、速度快和可靠性高的优点,可以将其应用于农机的控制,提高农机系统的可靠性。为此,本文将基于PLC对农机控制系统的可靠性进行研究。
1、农机控制系统设计
1.1技术路线
农机的控制系统可靠性研究的技术路线如图1所示。农机系统采用可编程控制器PLC进行控制,包括硬件系统和软件系统。硬件系统主要组成为踏板、方向盘、挡位和牵引装置等;软件系统主要是对农机进行控制,用于完成对农机的自动导航等控制。
图1农机控制系统可靠性研究技术路线
1.2PLC控制器设计
主控单元采用西门子S7系列可编程控制器,其具有体积小、高可靠性及可操控性好的优点,因此通常作为农机控制的首选。将其与农机的数据采集卡连接进行通信,通信方式采用自由口方式,即可根据用户的需求制定相应的通信协议。该方式使主控单元能够随时获得农机的各项运行参数,同时还与农机的编程软件连接。通过对农机的软件进行对应功能设计,即可完成对农机的智能控制。PLC控制器的控制系统简图如图2所示。
图2PLC控制器的控制系统简图
1.3硬件设计
硬件系统主要包括踏板、方向盘、挡位、离合、刹车、油门和牵引装置等农机的操控设备。其中,踏板包括离合器、刹车和油门踏板,通过调整各踏板行程进而调整农机的行驶速度。踏板与霍尔传感器连接,用于检测踏板的行程,利用电路放大器将角度放大,并将检测结果传递给数据采集卡进行数据后续的传输和处理。
挡位用于为农机行驶提供动力,共设置5个挡位,包括倒车挡。其通过连接5个霍尔传感器检测电压信号,并将检测结果传递给数据采集卡。
方向盘通过自动导航系统进行控制。农机按照自动导航系统的路线图自动操控方向盘行驶,还可通过人工进行方向盘的操控。
牵引装置用于连接待牵引农具,并将牵引力传递给待牵引农具的装置,其悬挂机构采用液压控制系统进行控制。
1.4软件设计
软件设计主要是针对农机的自动导航控制和悬挂系统的液压控制系统的相关控制算法进行设计。
农机的自动导航控制系统主要利用GPS定位装置对农机进行定位,转角检测装置测量农机角度,将数据传输给PLC控制器。PLC控制器通过对比农机位置与设定路线的偏差,将结果传递给农机对应的操控设备,及时修正,使农机按照预设路线行驶。农机自动导航控制原理图如图
3所示。
图3农机自动导航控制原理图
农机牵引装置中的悬挂系统采用电-液悬挂系统。工作时,设定耕深值,悬挂系统的检测装置用于检测牵引时的牵引力和耕深等值,并将其与设定值比较,根据PID控制算法对其进行自动调整,保证农机作业参数的稳定性,以确保农机牵引装置稳定工作。
2、可靠性研究
农机的可靠性评价采用模糊神经网络模型,简称FUN(FuzzyNeuralNetwork)。模糊神经网络通过神经网络实现模糊推理,是将模糊逻辑中函数的物理意义赋予给神经网络中没有物理含义的权值。该模型既具有模糊推理的结构性,又具有神经网络的学习能力[4,5],因此采用该模型对农机的可靠性进行研究。
2.1模糊神经网络结构
模糊神经网络结构图[6,7]如图4所示。
图4模糊神经网络结构图
模糊神经网络的结构共有5层,即输入层、隶属函数层、规则层、去模糊层和输出层。其中,输入层为第1层,设定输入值为M=(x1,x2,…,xn)T,结点数为N1=n,通过结点将输入值传递至隶属函数层;第2层隶属函数层中的1个结点为1个模糊语言变量,通过计算将每一个输入值对应至相应的隶属度函数;第3层规则层中的每个结点代表一个规则,通过计算每个规则的适用度,将其与隶属度函数相匹配;第4层去模糊层是对第3层中的每个结点进行归一化计算;第5层输出层则是进行清晰化计算并输出结果。
2.2模糊神经网络计算
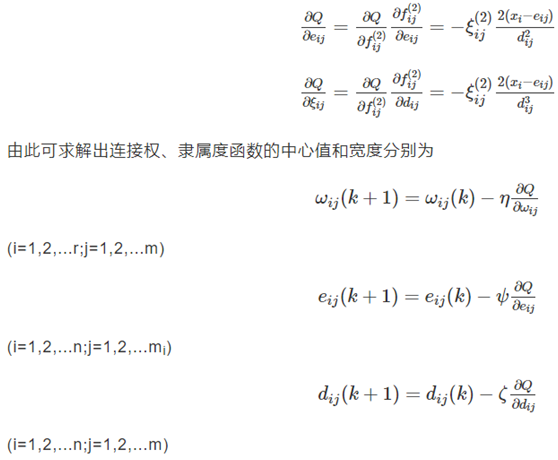
模糊神经网络计算主要是计算参数:①FUN结构中的最后1层连接权ωij(i=1,2,…,t;j=1,2,…,v);②在FUN结构的第2层中,隶属度函数的中心值eij和隶属度函数的宽度dij。
模糊神经网络中,若结点位置为第p层、第j个位置的结点,则对于该结点存在以下关系,即
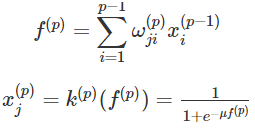
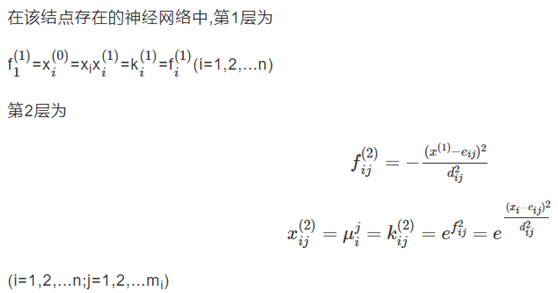
其中,eij和dij分别为神经网络中的第i个输入结点所在的第j个模糊集合的隶属度函数的中心值和宽度,它们均可调。
第3层为

其中,ya为神经网络的期望输出结果,y为实际输出结果。通过利用该函数,采用一阶梯度寻优的方法计算连接权、中心值和宽度,则

对f(3)取最小运算和相乘运算,得到一阶梯度为
2.3可靠性评价模型
为对农机的控制系统可靠性进行评价,除了采用神经网络进行计算外,还需要建立模糊神经网络的评价模型。模型的建立按照以下方法执行:①确立农机相关评价指标,并按照指标建立隶属度函数矩阵;②将隶属度函数矩阵按照神经网络计算的方法建立相关学习样本;③将学习样本带入神经网络结构中进行计算,得到神经网络的输出结果,则模型初始化完毕;④将待评价指标相关数据带入模糊神经网络进行计算,即可得到农机的控制系统可靠性评价结果。
3、试验
3.1可靠性评价指标
为确定农机控制系统的可靠性,确定以下评价指标:首次出现故障的时间MT1、无故障作业时间MT2、平均维修周期MT3、维修率MT4和故障频次γ。其计算方法分别为


其中,ti为第i台农机首次出现故障的时间;n为农机的台数;t为农机总作业时间;m为作业时间出现故障的总次数;q为农机总维修次数;tj为第j次维修时的维修总时间。
3.2可靠性评价
首先,采用标准学习样本对模糊神经网络进行训练;之后,筛选采用本文设计的PLC控制系统的5台农机进行作业试验。统计试验数据,并计算其5个可靠性评价指标,对试验结果采用模糊神经网络方法进行可靠性分析。5台农机的可靠性指标数据如表1所示。
表1试验农机可靠性指标数据
通过对表1中的数据进行归一化处理,并对照可靠性等级标准对照表,得到农机的可靠性等级评价结果,如表2所示。
表2试验农机可靠性评价等级
由表2可知,5台农机的可靠性评价等级达到优的概率为80%。这说明,采用该PLC机器人的农机控制系统可靠性较高,可以满足用户的需求。
4、结论
1)基于PLC机器人,对农机控制系统可靠性进行了研究。采用可编程控制器PLC进行控制,主要包括硬件系统和软件系统。硬件系统的主要组成为踏板、方向盘、挡位和牵引装置等,软件系统用于完成对农机的自动导航和电-液悬挂系统等的控制。
2)可靠性评价采用模糊神经网络模型,通过确定神经网络结构、计算方式和可靠性评价模型,从而确定农机可靠性评价的结果。
3)针对农机控制系统确定可靠性评价指标,进行可靠性试验,结果表明:基于PLC的农机控制系统的可靠性较高,可以满足用户的需求。
参考文献:
[1]郝红周,邓红发.农机产品可靠性设计的重要性[J].科技传播,2011(10):67.
[2]张迎春,耿瑞阳.可靠性设计在农机方面的应用[J].农业装备和车辆工程,2009(7):45-47.
[3]皮状行.可编程控制器的系统设计与应用实例[M].北京:机械工业出版社,2001.
[4]王道勇.模糊综合评判的失效与消除[J].系统工程理论方法应用,2004,7(2):66-69.
[5]张兴芳,管恩瑞,孟广武.区间值模糊综合评判及其应用[J].系统工程理论方法应用,2007,7(12):81-85.
[6]张乃尧,阎平凡.神经网络与模糊控制[M].北京:清华大学出版社,1998:37-66.
[7]杨振宇,徐用饭.模糊理论与神经网络的基础与应用[M].北京:清华大学出版社,2007:77-89.
戴花林.基于PLC的农机控制系统可靠性研究[J].农机化研究,2021,43(02):221-224.
基金:江西省教育厅科技计划项目(GJJ1326).
分享:


在现代化农业发展模式下,机械化种植成为了主流,由于我国农村地区广袤,这使得农机技术推广需要大量的资金作为支持,从产品研发到后期管理以及机械化种植等方面,都需要有雄厚的资金作为保障,而各级地方政府在农业资金使用方面有所欠缺导致技术推广工作迟迟不见起色,甚至还出现了推广链条断裂的问题,很多地区的农机技术也被搁浅。
2021-05-24
在国家三农问题结构调整以及新农村建设的高效协调发展下,我国的农村经济快速发展,农民对农业生产的投入力度得到进一步提升,特别是在农机工艺的需求上有了极大的改善,使得农机化进程也有了明显提高,为农业持续发展提供相应的保障,并对粮食产量增加、农民收入的大幅增加发挥着巨大的积极影响。
2020-06-24
在我国经济发展新形势下,农业作为农村地区经济发展的重要产业,其逐渐趋于规模化、产业化、集约化以及机械化方向发展,尤其随着大量新型农业机械的涌现,更是为农业机械化作业提供了技术支撑,合理应用农机作业,可以提升农业生产效能,降低农业生产成本,尤其在当前农村劳动力严重不足的情况下,能够节约人力资源。
2020-06-24
随着玉米种植面积的不断扩大,玉米连片经营模式成为趋势,这为农机耕作技术推广创造条件。自未来发展态势分析,玉米全程机械化成为玉米生产的主目标之一,通过合理的农机选型,配套的农艺作业衔接技术,以形成高效系统的玉米生产模式,最大程度的提升玉米产出质量和效益。
2020-06-24
2019年1月中旬,蒙城县农机推广站对全县花生生产进行调研,走访种植大户、农机合作社,实地查看在用作业机具,了解掌握花生生产农机化机具、技术应用基本情况。蒙城县花生生产以篱笆镇郭集为中心,在篱笆镇、三义镇、楚村镇相对集中,郭集社区建设有花生大市场,辐射服务三个乡镇和全县种植大户,全县种植面积10000hm2,以夏花生生产种植为主,春花生占到总面积的五分之一左右。
2020-06-24
平均故障间隔时间(MTBF),是指用于对产品质量可靠性的定量及衡量参数,是一种概率。可靠性主要是指针对产品预计发生故障的频率及所产生的危害程度,是产品内在的属性之一。可靠性决定于设计者,因此设计阶段非常重要,在设计阶段就要考虑产品的可靠性,从而从根本上提前防范各类故障及问题的产生,提高产品的质量。
2020-06-24
习主席曾经说绿水青山就是金山银山,因此保护农田生态环境,提高农作物的产量与质量作为当今农业生产的热点话题。应用而生机械保护性耕作技术,可以有效提高农作物产量的、涵养水源,保证农业的可持续发展。保护性耕作技术是现代化农业的典范。机械化保护性耕作技术是一项可以改善生态环境,提高农业质量的新型耕作技术,该技术的推广对实现现代化农业有重要意义。
2020-06-24
众所周知,作为我国最为重要的粮食作物之一,红薯适应能力强、产量极高且用途广泛。据科学化统计结果显示,我国红薯的种植面积位列世界第一位,在我国的农作物中,其种植面积排在水稻、小麦及玉米之后,位于第四位,可以说在我国农业经济中占有非常高的地位[1]。在现阶段的红薯日常生产过程中,鉴于种植过程以及收获劳动具有非常大的强度且需要非常多的劳动力。
2020-06-24
皖北地区种植玉米以夏玉米为主,平均每年种植57万hm2左右。2013年3月,安徽省农机技术推广总站玉米标准化种植现场会在宿州市埇桥区召开,标志着皖北地区玉米种植全面实行玉米标准化种植,通过逐年推广,已实现了标准行距50~60cm穴播玉米种植,消除了制约玉米不对行收获的“瓶颈”,为大力推广玉米果穗收获提供了条件。
2020-06-24
自动化控制技术在农业机械设计方面发挥着重要作用,因为农业机械的运作环境以及设计都较为复杂,单单凭借着传感系统以及控制系统并不能实现生产的高效化,所以需要加大研发力度。在这一条件下,智能化的农业机械便由此而生,智能化农业机械能够实现针对传感器反馈信号的智能化处理,同时和控制系统与操作人员完成信息的交互,进而保证机械作业的可靠性和效率性。
2020-06-24
人气:4802

人气:3725
人气:2606

人气:2552

人气:1959
我要评论
期刊名称:农机化研究
期刊人气:2130
主管单位:黑龙江省农业委员会
主办单位:黑龙江省农业机械学会,黑龙江省农业机械工程科学研究所
出版地方:黑龙江
专业分类:农业
国际刊号:1003-188X
国内刊号:23-1233/S
邮发代号:14-324
创刊时间:1979年
发行周期:月刊
期刊开本:大16开
见刊时间:1年以上

影响因子:4.369

影响因子:0.000
影响因子:0.000

影响因子:0.000
影响因子:0.000
科普杂志阅读、期刊信息查询、论文下载、文献查询、原创文章检测等多项服务。
服务热线
您的论文已提交,我们会尽快联系您,请耐心等待!
你的密码已发送到您的邮箱,请查看!

 2020-05-26
2020-05-26
 201
上传者:管理员
201
上传者:管理员





